
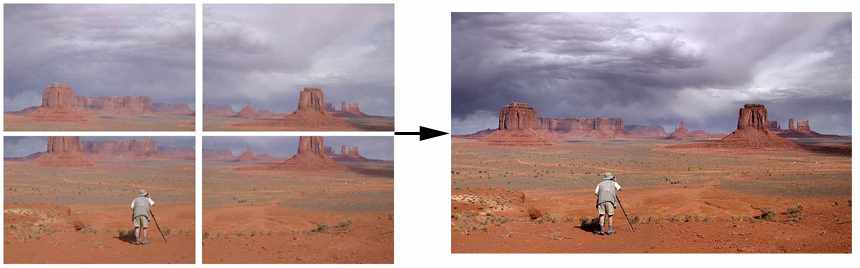
PTAssembler — специализированная программа для сборки панорам из фотографий, создания многорядных фотомозаик и подготовки изображений высокого разрешения. Она рассчитана не только на быструю автоматическую склейку кадров, но и на детальную ручную настройку проекта: пользователь может управлять контрольными точками, параметрами объектива, проекцией, положением каждого снимка, геометрией итогового изображения, масками, экспозицией, балансом белого и способом смешивания перекрывающихся областей.
Главная особенность PTAssembler заключается в сочетании двух подходов. Простую панораму можно собрать практически автоматически с помощью функции Auto-Create. Если результат требует точной доработки, программа позволяет перейти к отдельным этапам обработки и последовательно проверить исходники, параметры объектива, контрольные точки, оптимизацию, предварительный просмотр и экспорт. Благодаря этому PTAssembler подходит не только для обычной склейки нескольких фотографий, но и для сложных многорядных панорам, крупных мозаик, сцен с движущимися объектами, серий с разной экспозицией и кадров с различной глубиной резкости.
Что представляет собой PTAssembler
PTAssembler работает как панорамный редактор с поэтапной организацией проекта. Вместо одного общего окна с десятками разрозненных параметров программа делит рабочий процесс на пять последовательных экранов:
-
Step 1— добавление и проверка исходных изображений. -
Step 2— настройка параметров объектива и панорамы. -
Step 3— создание и редактирование контрольных точек. -
Step 4— оптимизация положения кадров. -
Step 5— предварительный просмотр и создание готового файла.
Такая логика делает PTAssembler понятнее после освоения базовых принципов панорамной фотографии. Пользователь всегда видит, на каком этапе находится проект и какие параметры нужно проверить перед переходом к следующему шагу.
Скачать PTAssembler
- Ретушь фото
- Русский интерфейс
- Просто для новичков
- Сложнее новичкам
- Только склейка панорам
- Устаревший интерфейс
Программа умеет собирать:
-
горизонтальные панорамы из одного ряда фотографий;
-
вертикальные панорамы;
-
многорядные панорамы;
-
мозаики из снимков, расположенных сеткой;
-
изображения высокого разрешения из большого количества исходников;
-
панорамы с ручным контролем геометрии;
-
проекты с экспозиционным смешиванием;
-
панорамы с увеличенной глубиной резкости;
-
серии кадров, снятых не строго из одной точки;
-
многослойные заготовки для последующей ретуши.
PTAssembler нельзя воспринимать только как программу для склейки панорам в один клик. Автоматический режим здесь удобен для быстрого запуска проекта, но сильнее всего приложение раскрывается при ручной работе. Если автоматический алгоритм ошибся при сопоставлении деталей, неверно определил положение одного из кадров или оставил заметный шов, пользователь может исправить конкретную проблему, не начиная обработку заново.
Для каких задач подходит программа
PTAssembler полезен в тех случаях, когда обычной автоматической склейки фотографий недостаточно. Программа дает фотографу контроль над всеми ключевыми этапами создания панорамы и позволяет использовать один проект как точную рабочую схему.
Однорядные панорамы
Самый простой сценарий — объединение нескольких кадров, снятых последовательно слева направо или справа налево. Для такой панорамы достаточно подготовить фотографии с перекрывающимися областями, загрузить их в проект и запустить автоматическую сборку.
Однорядная панорама подходит для:
-
пейзажей;
-
городских видов;
-
интерьеров без сложного переднего плана;
-
архитектурных объектов;
-
обзорных фотографий;
-
изображений, которые должны быть шире стандартного кадра.
При качественно снятой серии PTAssembler может самостоятельно найти совпадающие области, подобрать положение кадров и создать готовый результат.
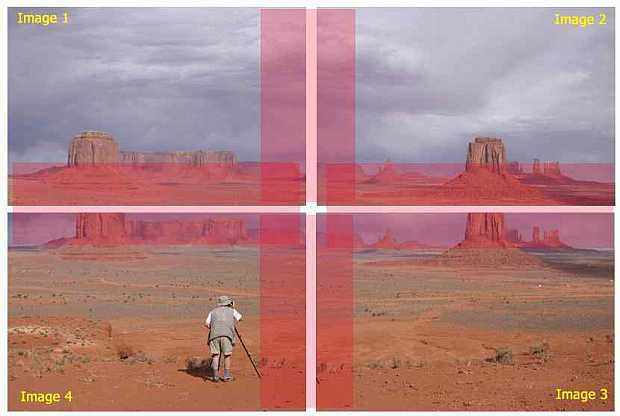
Многорядные панорамы
Многорядная панорама собирается из фотографий, снятых не только по горизонтали, но и по вертикали. Например, вместо одного ряда из шести кадров можно использовать два ряда по шесть фотографий или сетку 3 × 4. Такой способ съемки увеличивает разрешение и позволяет охватить больше пространства.
Многорядная сборка особенно полезна, когда требуется:
-
напечатать изображение крупного формата;
-
сохранить мелкие детали;
-
получить широкий угол обзора без использования сверхширокоугольного объектива;
-
собрать архитектурную композицию с высокой детализацией;
-
создать пейзажную фотомозаику;
-
подготовить основу для большого панорамного изображения.
PTAssembler не привязывает пользователя к жесткой сетке. Фотографии могут располагаться неидеально, а алгоритм выравнивания определит их взаимное положение по контрольным точкам.
Фотомозаики высокого разрешения
Программа подходит для создания изображений, размер которых значительно превышает разрешение одного кадра камеры. Вместо съемки сцены одним широкоугольным объективом можно снять множество увеличенных фрагментов с перекрытием и объединить их в один файл.
Такой подход дает несколько преимуществ:
-
выше детализация;
-
меньше геометрических искажений по краям;
-
возможность использовать объектив с более длинным фокусным расстоянием;
-
удобная подготовка изображения для крупной печати;
-
сохранение мелких объектов, которые теряются при обычной съемке.
PTAssembler умеет работать с крупными проектами и поддерживает форматы, рассчитанные на большие файлы, включая PSB.
Исправление сложной геометрии
Панорама может выглядеть неправильно даже при хорошем совпадении соседних кадров. Причиной становится неверно выбранная проекция, наклон горизонта, ошибочная опорная точка или неподходящие параметры объектива.
В PTAssembler можно вручную корректировать:
-
горизонт;
-
наклон;
-
направление камеры;
-
перспективу;
-
поле зрения;
-
тип проекции;
-
положение отдельных изображений;
-
дисторсию объектива;
-
вертикальные линии;
-
горизонтальные линии.
Программа использует параметры Yaw, Pitch и Roll, которые описывают ориентацию камеры при съемке каждого кадра. После оптимизации PTAssembler вычисляет наиболее подходящие значения и применяет их при сборке.
Работа с движущимися объектами
Если в области перекрытия оказался человек, автомобиль, ветка дерева или другой подвижный объект, автоматическое смешивание может создать полупрозрачный дубль или неестественный шов. В PTAssembler такие участки можно исключить с помощью масок.
Маскирование позволяет:
-
удалить прохожего из одной версии кадра;
-
оставить объект только на выбранной фотографии;
-
исключить смазанный фрагмент;
-
убрать автомобиль, попавший в область перекрытия;
-
запретить использование проблемной части изображения;
-
уменьшить количество артефактов при смешивании.
Маски создаются непосредственно при работе с изображениями на экране Step 3.
Экспозиционное смешивание и фокус-стекинг
PTAssembler умеет объединять не только соседние фрагменты панорамы, но и серии кадров, снятые из одной позиции с разными параметрами. Такой подход называется стекингом.
Программа поддерживает два основных сценария:
| Сценарий | Для чего используется |
|---|---|
| Экспозиционное смешивание | Для объединения кадров с разной яркостью и сохранения деталей в светах и тенях |
| Фокус-стекинг | Для увеличения глубины резкости за счет объединения кадров с разной точкой фокусировки |
Эти методы можно применять внутри панорамного проекта. Например, фотограф может снять два ряда кадров, а в каждой позиции сделать по три экспозиции. PTAssembler сначала объединит кадры внутри каждой группы, затем выполнит склейку готовых фрагментов в одну панораму.
Подготовка программы к работе
PTAssembler рассчитан на Windows. После установки программа запускается как отдельное настольное приложение и сохраняет проекты с параметрами сборки. Для корректной работы требуются компоненты Visual Basic 6 Runtime. На большинстве систем они уже присутствуют, но при ошибке запуска необходимо установить недостающие runtime-файлы.
Для проверки конфигурации используется команда:
Help | Check Installation
Она помогает убедиться, что основные компоненты программы и подключенные дополнительные инструменты доступны.
Собственный движок PTAStitcher
Основным рабочим движком PTAssembler служит PTAStitcher. Он выполняет две ключевые задачи:
-
оптимизацию взаимного положения изображений;
-
геометрическое преобразование и сборку панорамы.
PTAStitcher позволяет использовать PTAssembler без обязательной установки старых компонентов Panorama Tools. При необходимости программа сохраняет совместимость с альтернативными обработчиками, но для базового рабочего процесса достаточно встроенного движка.
Настройка дополнительных программ
PTAssembler может подключать внешние инструменты для автоматического поиска контрольных точек, смешивания изображений и стекинга. Настройки путей к программам и временным каталогам находятся в параметрах приложения.
В типичном проекте можно использовать:
| Инструмент | Назначение |
PTAStitcher |
Оптимизация и сборка панорамы |
PTAPicker |
Автоматический поиск контрольных точек |
CPFind |
Альтернативный детектор контрольных точек |
Panomatic |
Поиск контрольных точек в крупных проектах |
Enblend |
Смешивание перекрывающихся областей |
Smartblend |
Создание бесшовного результата в сложных сценах |
Multiblend |
Альтернативное смешивание изображений |
TuFuse |
Экспозиционное смешивание и фокус-стекинг |
Enfuse |
Экспозиционное смешивание |
CombineZM |
Фокус-стекинг |
PTAutomate |
Последовательная обработка проектов |
Для первого знакомства с программой не обязательно подключать все дополнительные компоненты сразу. Гораздо удобнее сначала собрать обычную панораму встроенными средствами, а затем добавлять внешние инструменты только для конкретных задач.
Интерфейс PTAssembler
Интерфейс PTAssembler построен по принципу мастера. В верхней части окна находятся вкладки Step 1, Step 2, Step 3, Step 4 и Step 5. Пользователь последовательно проходит каждый этап и может в любой момент вернуться назад, чтобы исправить настройки.
В программе нет визуального оформления в стиле современных редакторов фотографий. Интерфейс функциональный: таблицы, переключатели, поля ввода, кнопки, списки и отдельные окна для точной настройки. Такой подход требует внимательности, но позволяет контролировать параметры, которые часто скрыты в более простых программах для создания панорам.
Step 1 — добавление исходных изображений
Первый экран предназначен для загрузки фотографий и проверки состава проекта. Добавить файлы можно через меню:
File | Add Images...
Другой вариант — перетащить изображения мышью прямо в окно программы.
После добавления файлов PTAssembler показывает таблицу исходников. В ней отображаются названия изображений, размеры и дополнительные параметры. В зависимости от настроек программа также может выводить размер файла, сведения EXIF, выдержку, диафрагму, ISO, дату съемки и другую информацию.
Порядок кадров
Файлы добавляются в алфавитном порядке. Если названия фотографий соответствуют последовательности съемки, кадры сразу окажутся в удобном расположении. Когда порядок нарушен, его можно изменить кнопками перемещения вверх и вниз.
Правильная сортировка особенно важна для:
-
длинных однорядных панорам;
-
кадров, снятых несколькими рядами;
-
серий с разной экспозицией;
-
проектов с фокус-стекингом;
-
пакетной обработки;
-
автоматического поиска соседних изображений.
PTAssembler умеет находить совпадения по содержимому, поэтому идеальная сортировка не всегда обязательна. Однако аккуратно организованный проект проще проверять и исправлять вручную.
Предварительный просмотр исходника
Для проверки отдельного снимка используется кнопка просмотра. Изображение открывается во внешнем просмотрщике или в назначенном приложении. Это удобно, если нужно быстро проверить резкость, убедиться в отсутствии смаза или найти кадр с неправильной экспозицией.
Информация EXIF
PTAssembler умеет считывать EXIF-данные из JPEG и TIFF. Эти сведения помогают определить:
-
фокусное расстояние;
-
ориентацию кадра;
-
выдержку;
-
диафрагму;
-
ISO;
-
дату и время съемки;
-
GPS-координаты;
-
высоту;
-
параметры, необходимые для расчета поля зрения.
Если нужные EXIF-данные отсутствуют в обработанном изображении, программа может искать связанные RAW-файлы в той же или соседней папке и извлекать сведения из них.
Группы стекинга
На первом экране задаются группы кадров, снятых из одной позиции. Для этого используется идентификатор стека. Фотографии с одинаковым положением камеры, но разной экспозицией или фокусировкой, объединяются в одну группу.
Это нужно, когда проект включает:
-
брекетинг экспозиции;
-
несколько точек фокусировки;
-
одновременное смешивание яркости и резкости;
-
частичный стекинг только для отдельных участков панорамы.
Связанные параметры
PTAssembler позволяет связывать параметры изображений. Если все кадры сняты одним объективом без изменения фокусного расстояния, можно использовать одинаковые настройки для всей серии. Если часть исходников отличается, параметры разрешается отвязать и настраивать отдельно.
Такой подход особенно полезен для сложных проектов, где:
-
менялось фокусное расстояние;
-
использовались разные камеры;
-
часть кадров снята с другой позиции;
-
отдельные изображения требуют индивидуальной коррекции.
Step 2 — параметры объектива и панорамы
На втором экране задаются свойства объектива, поле зрения и способ проецирования итогового изображения.
Несмотря на большое количество полей, для обычного проекта достаточно проверить несколько ключевых параметров.
Horizontal FOV
Horizontal FOV — горизонтальный угол обзора исходного кадра. Это один из важнейших параметров в PTAssembler. Если значение сильно отличается от реального, оптимизатору будет сложно правильно сопоставить изображения, особенно в многорядной панораме.
Поле зрения можно задать вручную или рассчитать по фокусному расстоянию.
Actual
Поле Actual используется для ввода реального фокусного расстояния объектива. Например, если снимок сделан объективом 50 мм, в это поле вводится значение 50.
Multiplier
Поле Multiplier задает коэффициент пересчета фокусного расстояния в эквивалент для 35-миллиметрового кадра. Для полнокадровой камеры используется значение 1. Для камеры с кроп-сенсором применяется соответствующий коэффициент.
Calculate using image EXIF data
Кнопка Calculate using image EXIF data позволяет автоматически извлечь параметры съемки из EXIF и рассчитать поле зрения. Это удобно, когда метаданные корректно сохранены в исходниках.
Перед дальнейшей обработкой все равно стоит проверить результат. Ошибочная EXIF-запись или нестандартный объектив могут привести к неточному начальному значению.
Distortion
Параметр искажения объектива описывает бочкообразную или подушкообразную дисторсию. В простом проекте его можно оставить без ручной настройки и позволить оптимизатору подобрать подходящее значение.
Для точной калибровки объектива полезно использовать отдельные тестовые проекты, особенно если один и тот же объектив применяется регулярно.
Lens Type
В поле Lens Type выбирается тип объектива. Для большинства стандартных фотографий подходит прямолинейный вариант. Для кадров, снятых fisheye-объективом, нужно указать соответствующую модель проецирования.
Panorama Projection
Параметр Panorama Projection определяет геометрию итогового изображения. Выбор проекции влияет не только на внешний вид панорамы, но и на характер искажений по краям.
Наиболее востребованные варианты:
| Проекция | Когда использовать |
| Rectilinear | Для архитектуры, интерьеров и сравнительно узких панорам, где важно сохранить прямые линии |
| Cylindrical | Для широких горизонтальных панорам |
| Equirectangular | Для сферических панорам и широкоугольных проектов |
| Stereographic | Для выразительных широкоугольных изображений и необычной геометрии |
| Mercator | Для широких сцен с характерным растяжением по вертикали |
| Transverse Mercator | Для отдельных нестандартных композиций |
| Sinusoidal | Для специфических широкоугольных изображений |
| Miller Cylindrical | Для панорам с альтернативным распределением искажений |
| Orthographic | Для визуального эффекта проекции на плоскость |
| Cassini | Для нестандартного отображения широких сцен |
| Lambert Cylindrical Equal Area | Для равновеликой цилиндрической проекции |
| Rectilindrical | Для компромисса между прямолинейной и цилиндрической геометрией |
Для обычной пейзажной панорамы разумно начать с Rectilinear или Cylindrical. Если панорама охватывает очень широкий угол, прямолинейная проекция начинает заметно растягивать края, поэтому цилиндрический или эквидистантный вариант часто выглядит естественнее.
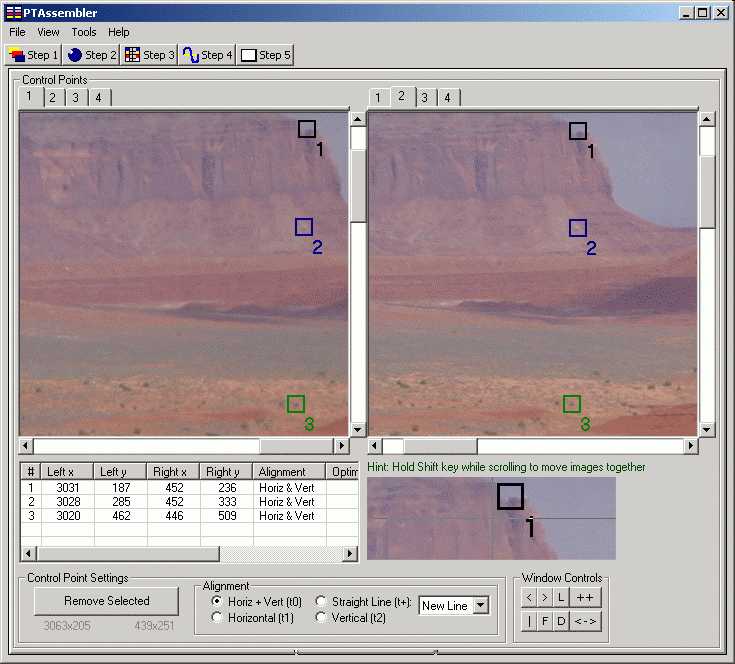
Step 3 — контрольные точки
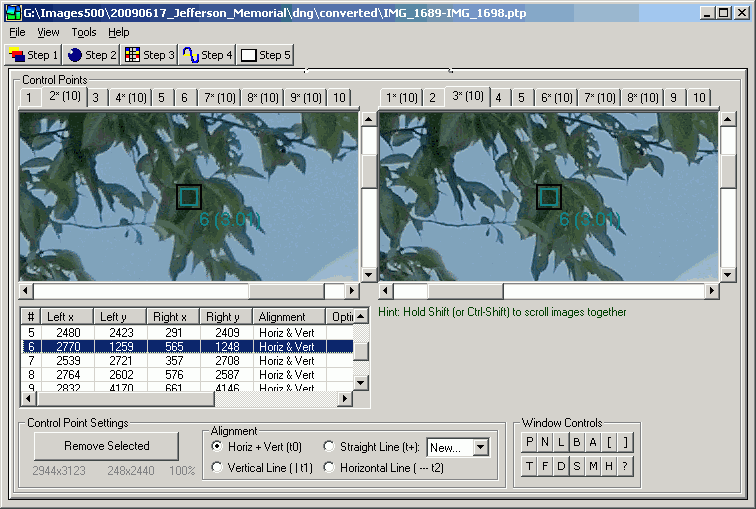
Контрольные точки — основа точной сборки панорамы. На экране Step 3 одновременно отображаются два изображения. Пользователь выбирает одинаковую деталь на левом и правом кадре, после чего PTAssembler создает пару координат.
Контрольной точкой может стать любой хорошо различимый объект, который присутствует на двух перекрывающихся фотографиях:
-
угол здания;
-
камень;
-
ветка;
-
дорожный знак;
-
край окна;
-
контрастная деталь рельефа;
-
элемент фасада;
-
вершина горы;
-
характерное пятно на поверхности.
Не стоит использовать облака, движущиеся автомобили, прохожих, воду, колышущуюся траву и другие нестабильные элементы. Их положение может меняться между кадрами, поэтому оптимизация даст неверный результат.
Как создать контрольную точку
Для добавления пары достаточно выполнить два действия:
-
Щелкнуть по характерной детали в левом изображении.
-
Щелкнуть по той же детали в правом изображении.
PTAssembler покажет маркеры и добавит координаты в таблицу. Для удаления ошибочной точки можно щелкнуть по ней правой кнопкой мыши и выбрать команду удаления.
Сколько точек требуется
Для обычной пары кадров достаточно нескольких точек, равномерно распределенных по области перекрытия. Лучше использовать не одну плотную группу, а точки в разных участках сцены.
Хорошая схема:
-
две точки ближе к верхней части перекрытия;
-
две точки в центральной части;
-
две точки ближе к нижней области;
-
дополнительные точки на сложных участках;
-
контрольные пары на разных расстояниях от центра кадра.
Если разместить все точки рядом, оптимизатор может хорошо совместить небольшой участок и ошибиться на краях.
Области перекрытия
На многорядной панораме нужно проверять не только соседние фотографии одного ряда, но и вертикальные связи между рядами. В сетке 2 × 2 контрольные точки могут потребоваться между верхними кадрами, нижними кадрами и диагонально или вертикально перекрывающимися изображениями.
Автоматический поиск точек
PTAssembler поддерживает автоматический поиск контрольных точек. Для этого могут использоваться PTAPicker, CPFind или Panomatic.
PTAPicker предназначен для быстрого поиска совпадающих деталей. Он умеет работать не только со всей парой изображений, но и с выделенными областями. Если автоматический алгоритм не находит нужное совпадение, можно ограничить поиск конкретным участком.
На экране Step 3 выделение области выполняется перетаскиванием мыши с удержанием Shift. После указания регионов в обоих окнах PTAPicker ищет соответствия только внутри выбранных фрагментов.
Для однорядной панорамы доступен ускоренный режим поиска. Он запускается удержанием Ctrl при нажатии кнопки Auto-Create или Generate controlpoints.
Микропозиционирование
При ручной работе важно не только поставить маркер примерно на нужную деталь, но и добиться точного совпадения. PTAssembler поддерживает микропозиционирование контрольных точек. Увеличенное окно помогает выбрать координату более аккуратно и уменьшить ошибку после оптимизации.
Функция полезна для:
-
архитектуры;
-
мозаик высокого разрешения;
-
кадров с длиннофокусным объективом;
-
проектов для крупной печати;
-
участков со сложной текстурой;
-
сцен с небольшим параллаксом.
Сортировка и прореживание
В проекте с сотнями точек часть совпадений может оказаться лишней или ошибочной. PTAssembler позволяет просматривать таблицу контрольных точек, сортировать значения и удалять проблемные пары.
Полезная команда:
View | Show All Control Points
Она открывает таблицу всех точек проекта. После оптимизации можно найти пары с наибольшей ошибкой и проверить их вручную.
Для автоматического прореживания используется кнопка H на экране Step 3:
-
H— прореживание по оптимизированной дистанции; -
Shift + H— прореживание по расположению.
Удалять точки можно и клавишей Delete.
Линейные контрольные точки
Помимо обычных совпадающих деталей, PTAssembler поддерживает контрольные линии. Они помогают выровнять архитектуру и горизонт.
Линии применяются, когда нужно:
-
сделать вертикальные стены действительно вертикальными;
-
исправить наклон горизонта;
-
убрать перекос здания;
-
улучшить перспективу;
-
стабилизировать композицию после сборки.
В окне предварительного просмотра вертикальную линию можно добавить перетаскиванием мыши. Для горизонтальной линии используется перетаскивание с удержанием Shift.
Маски
Маски создаются на экране Step 3 и исключают выбранные области из обработки. Они полезны, если один из кадров содержит нежелательный объект или дефект.
Пример: человек перемещается по площади и попадает сразу в две фотографии. При смешивании может появиться полупрозрачный двойник. Маской можно исключить человека на одном кадре и оставить чистую область с соседней фотографии.
PTAssembler поддерживает:
-
создание нескольких масок;
-
копирование маски между изображениями;
-
перенос всех масок с одного кадра на остальные;
-
сохранение масок;
-
загрузку масок;
-
привязку границы маски к краю изображения;
-
исключение замаскированной области из обработки.
Step 4 — оптимизация проекта
После настройки контрольных точек нужно вычислить положение изображений. Для этого используется экран Step 4.
Оптимизатор анализирует координаты контрольных точек и подбирает параметры, при которых одинаковые детали на соседних кадрах совпадают максимально точно.
Опорное изображение и опорная точка
Перед оптимизацией необходимо выбрать опорную точку. Она задает центральное направление панорамы и влияет на положение горизонта, перспективу и композицию.
Последовательность действий:
-
На экране
Step 4выбрать изображение в блокеRef Image/Point. -
Нажать кнопку
Set Reference Point. -
В открывшемся окне указать точку, соответствующую направлению взгляда прямо перед камерой.
-
Подтвердить выбор.
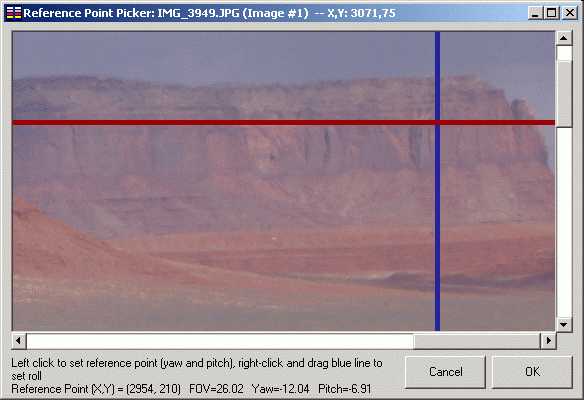
Опорная точка не всегда находится в геометрическом центре фотографии. Ее положение зависит от направления камеры при съемке.
Если камера была установлена ровно, точка обычно располагается около центра будущей панорамы. Если объектив был направлен вверх на фасад высокого здания, опорная точка окажется ниже. Если съемка велась с высоты вниз, она будет расположена ближе к верхней части изображения.
Ошибочно выбранная точка может привести к нескольким проблемам:
-
панорама окажется смещенной;
-
вертикали начнут сходиться;
-
горизонт будет наклонен;
-
здание получит неестественную перспективу;
-
появятся лишние пустые области по краям.
Yaw, Pitch и Roll
PTAssembler описывает положение камеры тремя угловыми параметрами:
| Параметр | Что означает |
Yaw |
Поворот камеры влево или вправо |
Pitch |
Наклон камеры вверх или вниз |
Roll |
Вращение камеры вокруг оптической оси |
После оптимизации программа вычисляет значения для каждого изображения. Если один кадр снят левее центра, его Yaw будет отрицательным. Для фотографии справа от центра значение станет положительным. Параметр Roll особенно важен при исправлении наклоненного горизонта.
Auto-Optimize
Для автоматической настройки используется кнопка:
Auto-Optimize
PTAssembler последовательно выполняет несколько этапов оптимизации и определяет, какие параметры нужно пересчитать. Программа не пытается сразу изменить все возможные значения одновременно, а корректирует проект постепенно.
В обычном сценарии оптимизируются:
-
Yaw; -
Pitch; -
Roll; -
параметры объектива;
-
дисторсия;
-
отдельные геометрические коэффициенты;
-
положение кадров относительно опорного изображения.
После завершения PTAssembler показывает среднюю дистанцию между контрольными точками. Чем меньше это значение, тем точнее совмещены фотографии.
Ручная оптимизация
Кнопка автоматической оптимизации подходит для большинства проектов, но опытный пользователь может выбрать параметры вручную. Это полезно, если требуется:
-
исправить только положение кадров;
-
пересчитать параметры объектива;
-
сохранить часть значений без изменений;
-
оптимизировать отдельную группу изображений;
-
проверить влияние конкретного коэффициента;
-
работать со снимками, сделанными из разных точек.
Настройки оптимизатора открываются командой:
File | Configure Optimizer
На экране Step 4 можно отмечать флажками изображения и параметры, которые разрешено менять. Для нескольких выделенных строк доступно групповое включение или отключение значений через контекстное меню.
Auto-Level и Auto-Rotate
Кнопки автоматического выравнивания помогают исправить наклон и привести панораму к более естественному положению. Они особенно полезны после автоматической оптимизации, когда изображения уже хорошо состыкованы, но композиция выглядит повернутой.
Step 5 — предварительный просмотр и создание результата
Пятый экран используется для расчета размеров, генерации тестового изображения и экспорта.
Auto Size Parameters
Кнопка:
Auto Size Parameters
автоматически вычисляет разумные значения ширины, высоты и поля зрения готовой панорамы. Это удобная отправная точка, но не обязательный окончательный вариант.
После автоматического расчета пользователь может изменить размеры вручную:
-
уменьшить итоговый файл для быстрого теста;
-
увеличить разрешение для печати;
-
скорректировать соотношение сторон;
-
изменить поле зрения;
-
добавить или убрать пустое пространство по краям.
Preview
Кнопка:
Preview
создает уменьшенную панораму для проверки. Предпросмотр позволяет заранее увидеть:
-
ошибки совмещения;
-
черные края;
-
неправильную проекцию;
-
наклон горизонта;
-
растянутые области;
-
проблемные швы;
-
неверную опорную точку;
-
лишние фрагменты по краям.
Создание полного файла высокого разрешения может занять заметно больше времени, поэтому тестовая панорама помогает избежать лишней обработки.
Create
Кнопка:
Create
запускает финальную сборку. Перед этим нужно выбрать выходной формат и способ смешивания.
Как быстро собрать панораму автоматически
Для простой панорамы необязательно вручную проходить каждый этап. PTAssembler поддерживает автоматическую сборку через Auto-Create.
Подготовка кадров
Перед загрузкой желательно проверить серию:
-
фотографии сняты последовательно;
-
соседние кадры перекрываются;
-
экспозиция не меняется без необходимости;
-
баланс белого одинаковый;
-
фокусировка зафиксирована;
-
в кадрах нет сильного смаза;
-
горизонт не меняется слишком резко;
-
передний план не содержит множества движущихся объектов.
Для обычной сцены достаточно перекрытия около 10–20%. Если деталей мало, лучше оставить больший запас.
Пошаговая автоматическая сборка
-
Запустить PTAssembler.
-
Добавить фотографии через
File | Add Images.... -
Проверить порядок кадров на экране
Step 1. -
При необходимости исправить сортировку кнопками перемещения.
-
Нажать
Auto-Create. -
Выбрать параметры автоматической обработки.
-
Дождаться поиска контрольных точек.
-
Проверить результат оптимизации.
-
Открыть предварительный просмотр.
-
Убедиться, что горизонт, края и швы выглядят корректно.
-
Выбрать выходной формат.
-
Запустить экспорт кнопкой
Create.
Автоматический режим особенно хорошо работает для пейзажей, дальних городских видов и сцен без выраженного переднего плана. Чем меньше параллакс, тем проще алгоритму совместить кадры.
Как собрать панораму вручную
Ручной рабочий процесс занимает больше времени, но дает полный контроль. Его стоит использовать для сложной архитектуры, многорядных мозаик, крупных проектов и панорам, в которых автоматический алгоритм оставляет ошибки.
Шаг 1. Загрузить исходники
На вкладке Step 1 добавить фотографии через:
File | Add Images...
После загрузки проверить:
-
количество файлов;
-
порядок кадров;
-
размеры;
-
ориентацию;
-
EXIF;
-
выдержку;
-
диафрагму;
-
ISO;
-
наличие случайных дублей;
-
резкость;
-
отсутствие поврежденных изображений.
Если серия состоит из нескольких рядов, удобно заранее именовать файлы так, чтобы последовательность была понятна без открытия каждого кадра.
Шаг 2. Проверить параметры объектива
Перейти на Step 2 и проверить Horizontal FOV. Если EXIF содержит корректные данные, использовать:
Calculate using image EXIF data
Затем убедиться, что выбран правильный Lens Type.
Для обычного объектива используется прямолинейная модель. Для fisheye нужно выбрать соответствующий тип, иначе геометрия будет рассчитана неправильно.
Шаг 3. Выбрать проекцию
Для начала можно использовать:
-
Rectilinear— если панорама не слишком широкая и важны прямые линии; -
Cylindrical— если горизонтальная сцена охватывает большой угол; -
Equirectangular— для сферических проектов; -
Stereographic— для выразительного широкоугольного результата.
После оптимизации проекцию можно изменить и сравнить варианты во встроенном окне предварительного просмотра.
Шаг 4. Создать контрольные точки
На вкладке Step 3 выбрать пару соседних кадров и добавить несколько точек в области перекрытия.
Рекомендуемый порядок:
-
Найти хорошо различимую деталь ближе к верхней части перекрытия.
-
Поставить точку на левом изображении.
-
Поставить точку на той же детали справа.
-
Повторить действие для центральной области.
-
Добавить пары ближе к нижней части.
-
Перейти к следующей паре фотографий.
-
Проверить вертикальные перекрытия между рядами.
-
Удалить ошибочные совпадения.
-
Использовать микропозиционирование для сложных участков.
Не следует концентрировать точки на одном объекте. Оптимизатору нужны данные по всей области пересечения.
Шаг 5. Проверить движущиеся объекты
Если в перекрытии находятся люди, машины, животные, вода, листья или другие нестабильные элементы, их лучше не использовать как контрольные точки.
При необходимости создать маски и исключить проблемные зоны из обработки.
Шаг 6. Выбрать опорное изображение
Перейти на Step 4, выбрать центральный кадр или фотографию, содержащую направление взгляда прямо перед камерой, затем нажать:
Set Reference Point
В открывшемся окне щелкнуть по нужной области.
Шаг 7. Запустить Auto-Optimize
Нажать:
Auto-Optimize
После завершения проверить среднюю дистанцию между контрольными точками. Если значение слишком велико, нужно найти ошибочные пары через:
View | Show All Control Points
Шаг 8. Исправить проблемные точки
Отсортировать таблицу по оптимизированной дистанции. Точки с наибольшей ошибкой проверить в первую очередь.
Возможные действия:
-
удалить неверную пару;
-
переставить маркеры точнее;
-
добавить несколько новых точек;
-
выбрать другой участок изображения;
-
исключить движущийся объект;
-
использовать более дальние детали;
-
проверить поле зрения;
-
изменить модель объектива.
Шаг 9. Повторить оптимизацию
После изменений снова нажать Auto-Optimize. Обычно несколько итераций позволяют получить значительно более точную геометрию.
Шаг 10. Выровнять горизонт
Если кадры хорошо совмещены, но панорама выглядит наклоненной, использовать Auto-Level, Auto-Rotate или линейные контрольные точки.
Для архитектуры стоит добавить вертикальные линии по углам стен, колоннам или оконным проемам. Для пейзажа — горизонтальные линии вдоль реального горизонта.
Шаг 11. Создать тестовый просмотр
На Step 5 нажать:
Auto Size Parameters
Затем создать уменьшенный вариант кнопкой:
Preview
Проверить:
-
швы;
-
горизонт;
-
края;
-
пропорции;
-
перспективу;
-
наличие черных областей;
-
обрезку;
-
проблемные движущиеся объекты.
Шаг 12. Экспортировать панораму
После проверки выбрать формат и нажать:
Create
Для быстрого результата подойдет JPEG или TIFF. Для ручной ретуши лучше использовать многослойный PSD, PSB или набор TIFF-файлов.
Почему контрольные точки могут давать ошибку
Даже правильно снятая серия иногда плохо оптимизируется. Причина обычно находится не в самой программе, а в исходных данных или неудачно выбранных маркерах.
Ошибочная пара
Если одна точка поставлена на окно, а вторая случайно попала на соседний элемент фасада, оптимизатор попытается совместить несовместимые координаты. В результате вся панорама может искривиться.
Решение: открыть таблицу точек, отсортировать значения по ошибке и удалить проблемную пару.
Слишком мало точек
Одна или две пары иногда позволяют совместить соседние кадры, но не дают достаточно данных для надежного вычисления геометрии.
Решение: добавить точки в разных частях перекрытия.
Неравномерное распределение
Если все маркеры расположены рядом, оптимизатор точно совмещает только небольшой участок.
Решение: распределить точки по всей длине перекрытия.
Параллакс
Параллакс возникает, когда камера вращается не вокруг подходящей точки или заметно перемещается между кадрами. Ближние объекты смещаются относительно дальнего фона, поэтому идеальное совмещение становится невозможным.
Решение зависит от сцены:
-
использовать маски;
-
выбирать контрольные точки на дальних объектах;
-
переснять серию с панорамной головкой;
-
исключить слишком близкие элементы;
-
использовать параметры положения камеры для отдельных сценариев;
-
оставить проблемную область для ручной доработки в слоях.
Движущиеся элементы
Вода, облака, листья, люди и автомобили меняют положение между снимками.
Решение:
-
не использовать их как контрольные точки;
-
исключить их масками;
-
выбрать другой алгоритм смешивания;
-
вывести многослойный файл и исправить область вручную.
Встроенный viewer/editor
PTAssembler включает отдельное окно предварительного просмотра и редактирования. Оно позволяет оценивать панораму не только после экспорта, но и во время настройки проекта.
В viewer/editor можно интерактивно менять:
-
поле зрения;
-
Yaw; -
Pitch; -
Roll; -
проекцию;
-
кадрирование;
-
положение изображения;
-
горизонт;
-
вертикальные линии;
-
горизонтальные линии.
Изменения отображаются сразу, поэтому пользователь видит влияние каждого параметра без длительного создания полного файла.
В окне предпросмотра можно запускать оптимизатор повторно. Это удобно для архитектурной панорамы: пользователь добавляет вертикальные линии, выполняет перерасчет и сразу оценивает исправленную перспективу.
Кнопки + и - рядом с параметрами поля зрения позволяют изменять охват сцены. Визуальные направляющие показывают будущие границы кадра.
Выходные форматы
PTAssembler предлагает несколько способов сохранить результат. Выбор зависит от того, нужен ли готовый файл или многослойная заготовка для ручной обработки.
| Формат | Назначение |
| JPEG | Быстрый готовый результат, публикация в интернете, предпросмотр |
| TIFF | Качественный файл для дальнейшей обработки и печати |
| PSD | Многослойный Photoshop-совместимый документ |
| PSB | Большой многослойный файл для изображений, превышающих ограничения PSD |
| Multiple TIFF | Набор отдельных TIFF-слоев для ручного объединения |
| Blended TIFF | TIFF с выполненным смешиванием перекрытий |
JPEG
JPEG удобно использовать для тестовой панорамы или готового изображения, которое не требует глубокой ретуши. Формат занимает меньше места, но не подходит для многократного редактирования и не сохраняет слои.
TIFF
TIFF предпочтительнее для качественной обработки. Он подходит для печати, цветокоррекции и архивного хранения промежуточного результата.
PSD
Многослойный PSD сохраняет отдельные изображения в одном документе. Пользователь может открыть файл в редакторе, проверить области перекрытия и вручную скорректировать швы.
PSB
PSB применяется для очень крупных панорам. Если проект состоит из десятков или сотен фотографий, итоговый файл может выйти за ограничения обычного PSD. В этом случае формат большого документа становится практичным решением.
Multiple TIFF
Если редактор не поддерживает подходящий многослойный документ или требуется отдельная обработка каждого фрагмента, PTAssembler может сохранить набор TIFF-файлов.
Многослойный экспорт и ручная доработка
Автоматическое смешивание не всегда дает идеальный результат. Сложный передний план, движущиеся объекты, изменение освещения и параллакс иногда требуют ручной ретуши.
Многослойный экспорт позволяет:
-
скрыть неудачный фрагмент;
-
изменить границу шва;
-
оставить объект только на одном слое;
-
исправить локальную яркость;
-
убрать двойника движущегося человека;
-
восстановить участок из соседнего кадра;
-
скорректировать резкость;
-
выполнить локальную цветокоррекцию.
Для простой панорамы многослойный экспорт необязателен. Если сцена сложная, он превращает автоматическую сборку в контролируемый рабочий процесс.
Смешивание изображений
После геометрического преобразования кадры нужно объединить так, чтобы границы между ними не бросались в глаза. PTAssembler поддерживает подключаемые программы смешивания.
Enblend
Enblend помогает сгладить переходы между соседними фотографиями. Он полезен при небольших изменениях яркости и в сценах, где автоматическое размещение шва дает аккуратный результат.
Smartblend
Smartblend ориентирован на сложные перекрытия и движущиеся объекты. Он может лучше справляться со сценами, где в соседних кадрах изменились люди, автомобили или другие элементы.
Multiblend
Multiblend используется как альтернативный обработчик. Его можно подключить для сравнения результата или оптимизации рабочего процесса.
Выбор конкретного инструмента зависит от исходников. Для спокойного пейзажа подойдет один алгоритм, для городской площади с прохожими — другой. Если автоматическое смешивание все равно оставляет дефекты, стоит экспортировать слои и выполнить локальную правку вручную.
Экспозиционная коррекция
PTAssembler умеет исправлять различия между соседними кадрами. Это важно, если камера работала в полуавтоматическом режиме или освещение менялось во время съемки.
Доступны корректировки:
-
экспозиции;
-
баланса белого;
-
виньетирования;
-
яркости;
-
фотометрических параметров.
Окно фотометрической настройки открывается командой:
View | Show exposure/whitebalance/vignette adjustments
Фотометрические параметры можно вычислять автоматически или задавать вручную. Для повторяющихся сценариев настройки сохраняются как пресеты.
Кнопка Load from EXIF позволяет использовать сведения из метаданных изображений.
Почему лучше снимать в ручном режиме
Даже при наличии автоматической коррекции лучше фиксировать параметры камеры во время съемки панорамы:
-
выдержку;
-
диафрагму;
-
ISO;
-
баланс белого;
-
фокусировку.
Если камера меняет экспозицию между кадрами, программа может выровнять яркость, но обработка становится сложнее. Особенно заметны перепады на небе, стенах и других однотонных поверхностях.
Стекинг в PTAssembler
Стекинг — одна из наиболее интересных возможностей программы. Он позволяет объединить несколько снимков, сделанных из одной позиции, а затем использовать результат как часть панорамы.
Общая схема обработки
Рабочая последовательность выглядит так:
-
Исходники геометрически преобразуются.
-
Фотографии группируются по позициям съемки.
-
Кадры внутри каждой группы объединяются.
-
Полученные фрагменты смешиваются между собой.
-
Черные области по краям обрезаются.
-
Формируется готовая панорама.
Экспозиционное смешивание
Экспозиционное смешивание помогает сохранить детали в тенях и светах. Например, для каждой позиции можно снять два или три кадра:
-
темный — для яркого неба;
-
средний — для основной сцены;
-
светлый — для теней.
PTAssembler объединит изображения внутри группы и создаст сбалансированный фрагмент.
Практический пример: горизонтальная панорама состоит из пяти позиций. В каждой позиции сделано по два кадра с разной выдержкой. В проект загружается десять файлов. После стекинга остаются пять экспозиционно смешанных изображений, которые затем объединяются в одну панораму.
Частичное экспозиционное смешивание
Необязательно делать брекетинг во всех позициях. Если сложное освещение встречается только в верхнем ряду или около окна, дополнительные экспозиции можно снять только для нужных участков.
PTAssembler обрабатывает такие проекты корректно: группы со стекингом объединяются, одиночные кадры остаются без изменений.
Фокус-стекинг
Фокус-стекинг полезен для сцен с близким передним планом и удаленным фоном. Например, в пейзаже перед камерой находятся камни, а вдали — горы. Один кадр не всегда обеспечивает достаточную глубину резкости.
Решение:
-
В каждой нужной позиции снять несколько фотографий.
-
На одной сфокусироваться на переднем плане.
-
На другой — на средней дистанции.
-
На третьей — на дальнем фоне.
-
Объединить серию в PTAssembler.
Программа создаст фрагмент с расширенной глубиной резкости и затем встроит его в панораму.
TuFuse
Для стекинга PTAssembler использует собственный инструмент TuFuse. Он умеет выполнять:
-
экспозиционное смешивание;
-
фокус-стекинг;
-
одновременное объединение кадров с разной яркостью и резкостью.
В качестве альтернативы можно подключать Enfuse для экспозиционного смешивания и CombineZM для фокус-стекинга.
Auto-Align
Функция Auto-Align выравнивает кадры внутри стека перед объединением. Это полезно, если между экспозициями возникло небольшое смещение камеры.
Работа со снимками из разных точек
Классическая панорамная съемка предполагает вращение камеры вокруг одной точки. Но в реальных условиях это не всегда возможно. Например, фотограф может перемещаться вдоль стены, снимать длинный фасад, создавать линейную мозаику или работать с серией кадров, полученных с разных позиций.
PTAssembler поддерживает параметры положения камеры. Они позволяют строить панорамы и мозаики, где исходники сняты не только поворотом камеры, но и с перемещением.
Эта функция полезна для:
-
длинных фасадов;
-
стен;
-
плоских объектов;
-
линейных мозаик;
-
отдельных технических съемок;
-
сцен, где невозможно установить камеру в одной точке.
При работе с разными позициями особенно важно правильно выбирать контрольные точки и учитывать параллакс.
GPS и данные местоположения
PTAssembler умеет использовать географические данные изображений. Программа считывает координаты из EXIF и может сопоставлять время съемки с GPX-треком.
Поддерживаются:
-
широта;
-
долгота;
-
высота;
-
временные метки;
-
GPX-файлы;
-
корректировка временных смещений;
-
обработка данных от нескольких камер.
GPS-возможности особенно полезны для больших архивов, съемки маршрутов и проектов, где важно сохранить сведения о месте создания панорамы.
Пакетная обработка
Если требуется собрать несколько панорам, необязательно запускать каждый проект вручную. PTAssembler поддерживает последовательную обработку заданий.
Пакетный режим полезен для:
-
серии интерьерных панорам;
-
съемки маршрута;
-
нескольких вариантов одного проекта;
-
тестирования разных настроек;
-
ночной обработки крупных файлов;
-
автоматизации повторяющихся операций.
Программа также умеет запускаться с параметрами командной строки. Это позволяет встроить сборку в подготовленный рабочий процесс.
Полезные команды и сочетания клавиш
PTAssembler поддерживает клавиатурное управление, что ускоряет работу с крупными проектами.
| Действие | Команда или сочетание | |
| Добавить изображения | `File | Add Images...` |
| Проверить установку компонентов | `Help | Check Installation` |
| Показать все контрольные точки | `View | Show All Control Points` |
| Открыть настройки оптимизатора | `File | Configure Optimizer` |
| Показать фотометрические настройки | `View | Show exposure/whitebalance/vignette adjustments` |
| Автоматически собрать панораму | Auto-Create |
|
| Автоматически оптимизировать проект | Auto-Optimize |
|
| Рассчитать размеры результата | Auto Size Parameters |
|
| Создать предпросмотр | Preview |
|
| Создать итоговый файл | Create |
|
| Удалить выбранную контрольную точку | Delete |
|
| Проредить точки по ошибке | H |
|
| Проредить точки по расположению | Shift + H |
|
| Связать прокрутку изображений на Step 3 | Удерживать Shift при прокрутке |
|
| Ускоренный поиск точек для одного ряда | Удерживать Ctrl при запуске Auto-Create или Generate controlpoints |
Преимущества PTAssembler
Глубокий ручной контроль
PTAssembler позволяет вмешиваться в каждый этап сборки. Пользователь может исправить отдельную точку, изменить геометрию одного кадра, перестроить проекцию, задать маску или выбрать другой способ смешивания.
Поддержка многорядных проектов
Программа хорошо подходит для мозаик и панорам высокого разрешения. Количество исходников не ограничивается одним рядом.
Несколько проекций
PTAssembler предлагает стандартные и необычные варианты проецирования. Это удобно для пейзажей, архитектуры, сферических панорам и творческих композиций.
Многослойный экспорт
Возможность сохранить PSD, PSB или набор TIFF-файлов делает программу полезной для профессиональной ретуши.
Стекинг внутри панорамы
Экспозиционное смешивание и фокус-стекинг можно использовать непосредственно в панорамном проекте. Это важное преимущество для сложных сцен.
Маски
Маскирование помогает бороться с движущимися объектами и локальными дефектами.
Оптимизация и контроль ошибок
PTAssembler не просто собирает фотографии, но и показывает данные для анализа: контрольные точки, расстояния, параметры положения кадров и результаты оптимизации.
Подключаемые инструменты
Пользователь может выбирать детектор контрольных точек, алгоритм смешивания и программу стекинга.
Работа с крупными изображениями
Поддержка PSB и многорядных фотомозаик позволяет создавать файлы высокого разрешения для печати и детального просмотра.
Недостатки PTAssembler
Интерфейс требует привыкания
PTAssembler ориентирован на точную настройку, поэтому новичку придется разобраться в контрольных точках, поле зрения, проекциях и параметрах Yaw, Pitch, Roll.
Внешний вид окна минималистичен
Программа выглядит как классическое Windows-приложение с таблицами и диалогами. Пользователю, привыкшему к современным графическим редакторам, интерфейс может показаться строгим.
Для сложных панорам требуется ручная работа
Автоматический режим ускоряет обработку, но не отменяет необходимость проверять швы, маски и геометрию. Это особенно заметно при съемке интерьеров, архитектуры и сцен с близким передним планом.
Параллакс нельзя полностью исправить программно
Маски, параметры камеры и ручной экспорт помогают уменьшить последствия, но не заменяют правильную съемку.
Большое количество настроек
Для простой панорамы часть параметров можно не трогать. В сложном проекте придется понимать назначение каждого этапа.
Сравнение с аналогами
PTAssembler конкурирует не с обычными фоторедакторами, а со специализированными панорамными приложениями. Его сильная сторона — детальный контроль сборки и возможность сочетать панораму со стекингом.
| Критерий | PTAssembler | PTGui | Hugin | PanoramaStudio Pro | Microsoft ICE | Autopano Giga |
| Основной подход | Автоматическая и ручная сборка | Автоматическая и профессиональная ручная настройка | Гибкий ручной и полуавтоматический рабочий процесс | Упрощенная автоматическая сборка с редактором | Максимально простой автоматический процесс | Автоматическая сборка с визуальным редактором |
| Однорядные панорамы | Да | Да | Да | Да | Да | Да |
| Многорядные панорамы | Да | Да | Да | Да | Да | Да |
| Ручные контрольные точки | Да | Да | Да | Да, в Pro | Ограниченно | Да |
| Маски | Да | Да | Да | Да, в Pro | Нет развитого редактора масок | Да |
| Экспозиционная коррекция | Да | Да | Да | Да | Автоматическая | Да |
| Фокус-стекинг внутри проекта | Да | Не является основной функцией | Требует отдельных инструментов | Не является основной функцией | Нет | Не является основной функцией |
| Экспозиционный стекинг | Да | Да | Да | Да | Ограниченно | Да |
| Многослойный экспорт | PSD, PSB, TIFF-слои | Да | Да | Зависит от сценария | Есть отдельные варианты экспорта | Да |
| Работа с крупными мозаиками | Да | Да | Да | Да | Да | Да |
| Необычные проекции | Да | Да | Да | Да | Базовые варианты | Да |
| Сложность освоения | Средняя или высокая | Средняя | Средняя или высокая | Низкая или средняя | Низкая | Средняя |
| Платформа | Windows | Windows, macOS, Linux | Windows, macOS, Linux | Windows, macOS | Windows | Windows, macOS, Linux |
| Главная особенность | Детальная ручная настройка и стекинг | Скорость, профессиональный интерфейс и широкий набор функций | Бесплатность и гибкость | Доступный рабочий процесс | Простота | Сильная автоматизация и визуальное редактирование |
PTAssembler и PTGui
PTGui ближе всего к PTAssembler по назначению. Обе программы подходят для сложных панорам, контрольных точек, масок, проекций и многорядных проектов.
PTGui удобнее для пользователя, которому важен современный рабочий процесс, быстрый автоматический анализ и активное использование графического ускорения. PTAssembler интереснее тем, кто хочет последовательно контролировать этапы, работать со стекингом через TuFuse и использовать классическую схему Step 1–Step 5.
PTAssembler и Hugin
Hugin — бесплатный панорамный редактор с большим количеством настроек. Он также использует контрольные точки, оптимизацию, маски и разные проекции.
Hugin подходит пользователям Windows, macOS и Linux, которым нужен свободно распространяемый инструмент. PTAssembler удобнее воспринимается как единая Windows-программа с последовательным мастером и собственным движком PTAStitcher.
PTAssembler и PanoramaStudio Pro
PanoramaStudio Pro ориентирован на более визуальный и понятный процесс. Он умеет автоматически собирать многорядные панорамы, корректировать экспозицию и использовать маски.
PTAssembler дает больше пространства для ручного анализа проекта. Его стоит выбирать, если важно видеть контрольные точки, разбираться в параметрах оптимизации и готовить сложные многослойные заготовки.
PTAssembler и Microsoft ICE
Microsoft Image Composite Editor подходит для быстрой автоматической склейки. Пользователь загружает кадры, выбирает ориентацию и экспортирует результат.
PTAssembler значительно сложнее, но дает больше возможностей для исправления ошибок. В ICE удобно собирать простую панораму, а PTAssembler лучше подходит для проекта, который требует точной настройки.
PTAssembler и Autopano Giga
Autopano Giga делает акцент на автоматическом обнаружении панорам, визуальном редакторе, масках и подготовке гигапиксельных изображений.
PTAssembler отличается по стилю работы. Вместо ориентации на визуальный редактор он предлагает поэтапную техническую настройку: исходники, объектив, контрольные точки, оптимизация, экспорт. Такой подход требует больше внимания, но позволяет последовательно разбирать причины каждой ошибки.
Кому подойдет PTAssembler
PTAssembler стоит использовать фотографам, которым недостаточно простой автоматической склейки.
Программа особенно полезна для:
-
пейзажных фотографов;
-
авторов многорядных панорам;
-
создателей изображений высокого разрешения;
-
фотографов архитектуры;
-
пользователей, работающих с крупной печатью;
-
владельцев сложных архивных проектов;
-
авторов панорам с экспозиционным смешиванием;
-
фотографов, использующих фокус-стекинг;
-
пользователей, готовых вручную проверять контрольные точки;
-
специалистов, которым нужен многослойный экспорт.
PTAssembler может оказаться избыточным, если задача сводится к объединению двух или трех простых кадров для быстрой публикации. В таком случае достаточно нажать Auto-Create, но большая часть возможностей программы останется невостребованной.
Практические советы
Снимайте с запасом перекрытия
Для простой сцены хватает умеренного перекрытия, но в архитектуре и интерьерах лучше оставлять больший запас. Это упрощает поиск контрольных точек и дает свободу при выборе шва.
Фиксируйте экспозицию
Ручной режим камеры уменьшает количество проблем при смешивании. Особенно важно зафиксировать баланс белого.
Не меняйте фокус без необходимости
Для обычной панорамы фокус должен оставаться одинаковым. Менять его стоит только при осознанном фокус-стекинге.
Проверяйте передний план
Чем ближе объект к камере, тем сильнее проявляется параллакс. При съемке интерьера или архитектуры полезна панорамная головка.
Не доверяйте автоматическим точкам без проверки
Автоматический детектор ускоряет работу, но может выбрать нестабильную деталь или ошибочное совпадение. После оптимизации стоит открыть таблицу точек и проверить самые большие значения ошибки.
Делайте тестовый Preview
Не запускайте полный экспорт крупной мозаики до проверки уменьшенного варианта.
Для сложных сцен сохраняйте слои
Многослойный PSD, PSB или набор TIFF-файлов дает возможность исправить проблемный шов без повторной сборки.
Используйте маски до экспорта
Если нежелательный объект заметен еще на этапе настройки, проще исключить его маской заранее.
Частые вопросы
Можно ли собрать панораму автоматически?
Да. Для этого используется Auto-Create. Программа добавляет контрольные точки, оптимизирует положение изображений и готовит результат с минимальным количеством ручных действий.
Можно ли собирать многорядные панорамы?
Да. PTAssembler подходит для рядов, сеток и мозаик высокого разрешения.
Нужны ли Panorama Tools?
Для основного рабочего процесса достаточно встроенного движка PTAStitcher. Дополнительные обработчики подключаются при необходимости.
Для чего нужны контрольные точки?
Они указывают одинаковые детали на перекрывающихся изображениях. По этим координатам оптимизатор вычисляет положение кадров.
Как удалить ошибочную точку?
Выбрать точку и удалить ее через контекстное меню или клавишей Delete.
Что делать, если панорама кривая?
Проверить Horizontal FOV, тип объектива, опорную точку, контрольные точки, параметры Yaw, Pitch, Roll, горизонтальные и вертикальные линии.
Что делать, если заметны швы?
Использовать другой алгоритм смешивания, создать маски или экспортировать многослойный файл для ручной ретуши.
Можно ли удалить человека из панорамы?
Да. Если объект присутствует только на одном из перекрывающихся кадров, его можно исключить маской.
Поддерживается ли PSD?
Да. PTAssembler умеет создавать Photoshop-совместимые многослойные файлы.
Для чего нужен PSB?
PSB используется для панорам, которые слишком велики для обычного PSD.
Можно ли сохранить отдельные слои?
Да. Для этого подходит многослойный PSD, PSB или набор TIFF-файлов.
Можно ли использовать фотографии с разной экспозицией?
Да. Программа поддерживает экспозиционное смешивание и фотометрическую коррекцию.
Поддерживается ли фокус-стекинг?
Да. Кадры с разной точкой фокусировки можно объединять через TuFuse.
Что такое TuFuse?
Это инструмент стекинга, который используется для смешивания экспозиций и увеличения глубины резкости.
Что показывает средняя дистанция между контрольными точками?
Она показывает точность совмещения. Чем меньше значение после оптимизации, тем лучше совпадают изображения.
Можно ли исправить параллакс?
Частично. Маски, ручные точки и параметры положения камеры помогают уменьшить проблему, но сильный параллакс лучше предотвращать при съемке.
Подходит ли PTAssembler для гигапиксельных изображений?
Да. Программа рассчитана на крупные мозаики и поддерживает форматы для больших файлов.
Итоги
PTAssembler — мощная программа для создания панорам, которая сочетает автоматическую сборку и детальную ручную настройку. Ее можно использовать как простой инструмент для склейки нескольких фотографий или как полноценную рабочую среду для многорядных фотомозаик, крупноформатных панорам, архитектурных изображений, экспозиционного смешивания и фокус-стекинга.
Главная ценность PTAssembler — управляемость результата. Пользователь не ограничен единственной кнопкой автоматической обработки. Если панорама собрана неправильно, можно найти причину: проверить контрольные точки, изменить поле зрения, выбрать проекцию, настроить опорную точку, скорректировать Yaw, Pitch, Roll, добавить маску, подключить другой алгоритм смешивания или вывести слои для ручной доработки.
PTAssembler требует внимательного подхода, но именно это делает его полезным для сложных проектов. Когда обычная программа для склейки панорам дает только приблизительный результат, PTAssembler позволяет последовательно довести изображение до нужного качества.